Current Projects
Ascent Descent Localization
The goal of the project is to find the most appropriate feature detector at various levels in underwater to use for localization. To achieve the goal a robot collects footage both while ascending and descending and this data is then used on several commonly used feature detectors and descriptors to find the best match.
Experimental Comparison of Open Source Vision-Based State Estimation Algorithms
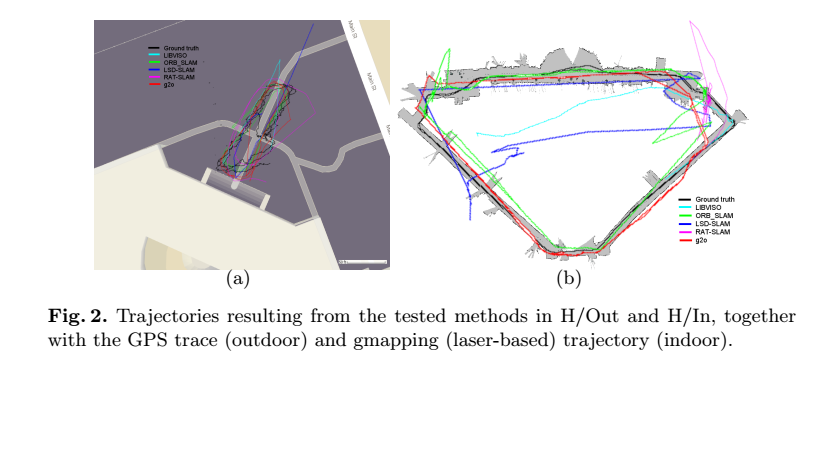
The problem of state estimation using primarily visual data has received a lot of attention in the last decade. Several open source packages have appeared addressing the problem, each supported by impressive demonstrations. Applying any of these packages on a new dataset however, has been proven extremely challenging. Suboptimal performance, loss of localization, and challenges in customization have not produced a clear winner. Several other research groups have presented superb performance without releasing the code, sometimes materializing as commercial products. In this paper, ten of the most promising open source packages are evaluated, by cross validating them on the datasets provided for each package and by testing them on eight different datasets collected over the years in our laboratory. Indoor and outdoor, terrestrial and flying vehicles, in addition to underwater robots, cameras, and buoys were used to collect data. An analysis on the motions required for the different approaches and an evaluation of their performance is presented.